End-to-end Differentiable Clustering with Associative Memories
End-to-end Differentiable Clustering with Associative Memories
Bishwajit Saha 1 Dmitry Krotov 2 Mohammed J. Zaki 1 Parikshit Ram 2 3
摘要
聚类是一种广泛使用的无监督学习技术,涉及到一个密集的离散优化问题。联想记忆模型或AMs是一种可微的神经网络,定义了一个递归动力系统,它已与各种深度学习架构集成。我们揭示了AM(Associative Memory)动力学和聚类中所需的固有离散分配之间的新联系,提出了一种新的无约束的连续松弛问题,使端到端可微聚类,称为ClAM(clustering with AM)。利用AMs的模式完成能力,我们进一步开发了一种新的自监督聚类损失。我们对不同数据集的评估表明,ClAM受益于自监督,并显著改进了传统的Lloyd‘s k-means算法和最近的连续聚类松弛(剪影系数高达60%)。
1. 引言
最近,传统的联想记忆或AM模型(Hopfield, 1982;
1984)被重新制定,以显著提高其记忆存储容量,并与现代深度学习技术集成(Krotov
& Hopfield, 2016; Ramsauer et al., 2020; Krotov & Hopfield,
2021; Krotov, 2021)。这些新模型被称为密集联想记忆(Dense Associative
Memories),是完全可微的系统,能够在突触权重中存储大量的多维向量,称为模式或“记忆”。它们可以使用反向传播算法在端到端完全可微的设置中进行训练,通常带有自监督损失。
我们认为,这种以端到端可微的方式学习AM的突触权值的能力,以及每个数据点恰好指向一个记忆的离散分配(关联),使AM唯一适合于可微聚类的任务。我们在图1中给出了一个简单的结果,其中标准的基于原型的聚类方案(离散的和可微的)无法找到正确的聚类,但我们提出的基于AM的方案是成功的。具体来说,我们做出了以下贡献:
- 我们开发一个灵活的数学框架集群AM或ClAM,这是一个新颖的连续无约束放松的离散优化问题,允许集群端到端可微的方式,同时保持整个训练的离散集群分配,与线性时间集群分配。
- 我们利用AMs的模式完成能力来开发一个可区分的自监督损失,以提高聚类质量。
- 我们的经验证明,ClAM能够持续提高k-means高达60%,可以同时与基于光谱的聚类方法和与基于凝聚的聚类方法竞争,并产生深刻的解释。
2.相关工作
离散聚类算法
聚类是一个固有的硬组合优化问题。基于原型的聚类公式,如k-means聚类是np困难的,即使是对于k
=
2(Dasgupta,2008)。然而,广泛使用的Lloyd’s算法或Voronoi迭代方法(Lloyd,1982)可以相当有效地找到局部最优解,这可以通过多次重启和仔细的迭代来改进(Vassilvitskii
& Arthur,
2006)。它是一种直观的离散算法,在A(根据当前原型诱导的Voronoi分区(Aurenhammer,1991)为集群的分配点)和B(基于当前集群分配更新原型点)之间交替使用。然而,该方案的离散性质使其难以逃脱任何局部最小值。我们认为,基于SGD的原型聚类能够通过逃避局部最小值来提高集群的质量,同时也继承了SGD的计算效率。光谱聚类公式(Donath
&霍夫曼,1973;Von
Luxburg,2007)利用点的成对相似性或亲和性的特征谱(用图拉普拉斯式表示)将数据划分为“连接组件”,但没有明确地提取每个聚类的原型。这允许光谱聚类以Voronoi分区不允许的方式对数据进行分区。然而,它天真地需要二次时间(点数)来生成拉普拉斯矩阵,也需要三次时间来进行谱分解。层次聚类(Johnson,1967)基于先前建立的聚类找到连续的聚类,以自上而下的方式将它们划分,或以自下而上的方式进行组合。这些离散分层算法天真地在点的数量,尽管一些形式的自下而上的凝聚方案可以显示在二次(Sibson,1973)甚至次二次时间(3月等,2010)利用双树算法(Ram等人,2009;Curtin等人,2013;2015)。
密度聚类方案
如流行的DBSCAN(酯等,1996)和SNN(阿吉拉尔等,2001),不认为集群作为离散优化问题,但发现的问题模式数据分布,允许任意形状的集群鲁棒性噪声和异常值(桑德et
al.,1998)。然而,多维密度估计是一项具有挑战性的任务,特别是使用非参数方法(西尔弗曼,1986;Ram
&
Gray,2011),导致使用参数模型,如高斯混合模型(雷诺兹,2009)(可以从期望最大化的数据中估计(Dempster
et al.,1977))。
可微深度聚类
可微性在深度聚类中至关重要,我们希望同时学习点的潜在表示,并在该潜在空间中执行聚类(Ren
et al., 2022;Zhou et al., 2022)。现有的可微聚类公式,如范数和(Panahi et
al.,2017)或非负矩阵分解(Kim &
Park,2008),本质上是解决约束优化,不直接适合端到端可微深度学习管道。因此,各种方案利用了某种形式的软聚类公式,如模糊k-均值(Bezdek
et
al.,1984)。Xie等人(2016)提出了一种新的概率k-means公式,启发于t-SNE(Minton,2008),对预先训练的自编码器(AE)的表示进行可微聚类(DEC),Guo
et al. (2017a)
(IDEC)显示了从联合学习表征和聚类中获得的收益。对于图像深度聚类中的表示学习,Song等人(2013)、Xie等人(2016)和Yang等人(2017)使用了堆叠自动编码器,Guo等人(2017b)(DCEC)使用卷积自动编码器(CAE)进行了进一步的改进。Chazan等人(2019年)使用了多个AEs,每个聚类一个,但(软)聚类分配是使用模糊k-means进行的。Cai等人(2022)在DEC放松中增加了一个“焦点损失”,以惩罚非离散任务,同时也增强了表征学习。深度子空间聚类(Peng等人,2016;Ji等人,2017;Zhang等人,2019)放宽了组合光谱聚类问题(同样采用部分聚类分配),并利用“self-expressive”层以可微的方式同时学习必要的拉普拉斯矩阵(相似度矩阵)和聚类。因此,深度聚类通常使用一些概率部分分配的点给多个簇,偏离了原始k-means的离散性质。此外,这些方案通常利用通过Lloyd(1982)进行的预先训练过的AEs和/或k-means来初始化网络参数。我们提出的ClAM保持了聚类的离散分配性质,并且在没有任何特殊播种的情况下工作良好。
联想记忆(AM)
这是一个神经网络,它可以存储一组多维向量-记忆-作为一个循环动态系统的定点吸引子状态。它被设计为将初始状态(呈现给系统)与固定点(内存)上的最终状态关联起来,从而定义吸引力的不相交盆地或数据域的分区,因此可以表示聚类。该网络在数学上被形式化为经典的Hopfield网络(霍普菲尔德,1982),但已知其内存容量有限,只能在d维数据域中存储≈0.14d随机内存(Amit等人,1985;McEliece等人,1987)。对于相关数据,容量甚至更小,并且通常会导致一个不动点将整个数据集吸引到单个盆地中。对于相关数据,容量甚至更小,并且通常会导致一个不动点将整个数据集吸引到单个盆地中。这种行为对于集群来说是有问题的,因为集群的数量——稳定的固定点的数量——应该与数据维数解耦。Krotov
&
Hopfield(2016)提出了现代霍普菲尔德网络或密集AM,通过在动态系统中引入快速增长的非线性激活函数,允许更密集的内存排列,以及超线性(d)内存容量。对于某些激活函数,致密AMs具有幂律甚至指数容量(克罗托夫&霍普菲尔德,2016;德米西吉尔等人,2017;拉姆索尔等人,2020年;卢西贝罗和梅扎德,2023年)。Ramsauer等人(2020)证明了变压器的注意机制(Vaswani等人,2017)是具有软max激活的密集AMs的一种特殊极限情况。密集的AMs也被用于描述整个变压器块(Hoover等人,2023年),以及集成在复杂的基于能量的神经结构中(Hoover等人,2022年)。对这些结果的回顾见Krotov(2023)。密集的AMs最近也被研究与缝线连接(Burns
& Fukai,2023),并应用于异质结合环境(Liang et
al.,2022)。在我们的工作中,我们将证明密集算法的循环动态和大内存容量使它们唯一适合聚类。
3.集群中的联想记忆
在本节中,我们提出了(i)基于AMs的ClAM的数学框架,(ii)激发了其对聚类的适用性,以及(iii)提出了一种学习记忆的方法,以进行良好的聚类。我们将所有这些放在我们的新的基于原型的聚类算法ClAM中。
3.1.联想记忆:数学框架
在d维欧几里得空间中,考虑M内存\(\boldsymbol{\rho}_\mu\in\mathbb{R}^d,\mu\in[M]\triangleq\{1,\ldots,M\}\)(我们稍后将讨论记忆是如何学习的)。这个数学框架的关键方面是能量函数和attractor
dynamics(Krotov & Hopfield, 2021; Millidge et al.,
2022)。一个适合聚类的能量应该是一个点(或一个粒子)\(v\in\mathbb{R}^d\)的连续函数。此外,能量应该有M个局部最小值,对应于每个内存。最后,当一个粒子逐渐接近一个记忆时,它的能量应该主要由单个记忆决定,而剩余的M−1记忆的贡献应该很小。一个满足这些要求的能量函数为:
\[E(\boldsymbol{v})=-\frac{1}{\beta}\log\left(\sum_{\mu\in[M]}\exp(-\beta\|\boldsymbol{\rho}_{\mu}-\boldsymbol{v}\|^{2})\right)\]
用一个标量的\(\beta >
0\)被解释为一个逆的“温度”。随着\(\beta\)的增长,方程1中的exp(·)确保只有前导项仍然显著,而其余的M−1项被抑制。因此,整个能量函数将用最近记忆周围的抛物线来描述。该空间将被划分为每个记忆周围的M个吸引盆地,每个记忆周围的能量函数的形状将主要由最近的记忆来定义,并对其他记忆进行了小的修正。
attractor
dynamics通过dv/dt控制v在时间内空间中的移动,同时确保能量减少。这就是dE
(v)/dt <
0,它确保了一个粒子收敛到一个局部最小值——动力学的一个不动点。attractor
dynamics可以通过能量景观上的梯度下降来描述: \[\tau\frac{d\boldsymbol{v}}{dt}=-\frac{1}{2}\nabla_{\boldsymbol{v}}E=\sum_{\mu\in[M]}(\rho_{\mu}-\boldsymbol{v})
\boldsymbol{\sigma}(-\beta\|\rho_{\mu}-\boldsymbol{v}\|^{2})\]
其中\(\tau >
0\)是一个特征时间常数,描述了粒子在能量景观上移动的速度,\(\sigma(\cdot)\)是对记忆缩放距离的softmax函数,定义为\(\sigma(z_{\mu})=\exp(z_{\mu})\Big/\sum_{m=1}^{M}\exp(z_{m})\)的任何\(\mu
\in[M]\)。这一点如图2a所示。这就保证会减少能量 \[\frac{dE(\boldsymbol{v})}{dt}\stackrel{(\mathbf{a})}{=}\nabla_{\boldsymbol{v}}E(\boldsymbol{v})\cdot\frac{d\boldsymbol{v}}{dt}\stackrel{(\mathbf{b})}{=}-2\tau\Big\|\frac{d\boldsymbol{v}}{dt}\Big\|^2\stackrel{(\mathbf{c})}{\leq}0\]
其中(a)为链式规则,(b)遵循方程2,(c)中的等式表示局部平稳性。在一个离散的时间步长t+1下,对于点v从状态\(v_t\)到\(v^{t+1}=v^t+\delta^{t+1}\)的有效更新\(\delta^{t+1}\)是通过有限差分: \[\delta^{t+1}=\frac{dt}{\tau}\sum_{\mu\in[M]}(\rho_\mu-v^t)
\sigma(-\beta\|\rho_\mu-v^t\|^2)\]
给定一个点S的数据集,对于每个点v∈S,我们可以用一些噪声破坏它,从而产生一个扭曲的点v˜。这可以作为AM网络v0←v˜的初始状态。AM动态是由可学习的权重ρµ,µ=1,…,M,它也对应于动态(记忆)的固定点。根据方程4,T递归的网络随时间演化,其中选择T以确保充分收敛到一个固定点(见图2b中的例子)。将最终状态vT与未损坏的v进行比较来定义损失函数
\[\mathcal{L}=\sum_{\boldsymbol{v}\in
S}\|\boldsymbol{v}-\boldsymbol{v}^{T}\|^{2}\\\mathrm{~where~}\boldsymbol{v}^{0}\leftarrow\tilde{\boldsymbol{v}}\]
相对于AM参数ρµ,它的反向传播最小。在集群的背景下,AM模型自然诱导一个分区的数据空间不重叠盆地的吸引力,隐式定义了一个硬集群分配定点在每个盆地,并通过完全连续的和可微的动态,允许学习与标准深度学习框架,我们接下来讨论。
3.2.AM作为一个可微离散arg min求解器
考虑具有数据集\(S\subset\mathbb{R}^{d}\)的原始k-means目标,其中我们学习k个原型\(R\triangleq\{\rho_{\mu},\mu\in[k]\}\)与\([k]\triangleq\{1,\cdot\cdot,k\}\)通过解决以下问题:
\[\min_{R}\sum_{\boldsymbol{x}\in
S}\|\boldsymbol{x}-\boldsymbol{\rho}_{\mu_{\boldsymbol{x}}^{\star}}\|^{2}\\\text{s.t.}\mu_{\boldsymbol{x}}^{\star}=\arg\min_{\mu\in[k]}\|\boldsymbol{x}-\boldsymbol{\rho}_{\mu}\|^{2}\]
\(\mu^⋆_x\)(对于每个x)的离散选择使方程6成为一个不能通过(随机)直接解决梯度下降的组合优化问题。这个问题的一个常见的连续松弛方法如下:
\[\operatorname*{min}_{R}\sum_{x\in
S}\sum_{\mu\in[k]}w_{\mu}(x)\left\|x-\rho_{\mu}\right\|^{2}\]
其中(通常)\(w_{\mu}(x)\ \in\
[0,1]\)和\(\sum{}_{\mu\in[k]}\,w_{\mu}(x)=1,\forall x\in
S\)。因此,这些权重\(\{w_{\mu}(x),\mu\in[k]\}\)定义k原型的概率,并设计在最接近的原型\(\rho_{\mu_{x}^*}\),并在剩余的原型上尽可能小。例如,具有到原型的距离的softmax函数\(\sigma(\cdot)\)已被用作\(w_{\mu}(x)=\sigma(-\gamma\|\alpha-\rho_{\mu}\|^{2})\),其中,\(\gamma > 0\)是一个超参数,并作为\(\gamma\to\infty,\),\(\sum_{\mu\in[k]}\left.w_{\mu}(x)\|x-\rho_{\mu}|\right|^{2}\to\left\|x-\rho_{\mu_x^*}\right\|^{2}\)。其他加权函数也开发出具有类似的特性(Xie
et
al.,2016),本质上利用了到学习原型的距离的加权和,从而在本质上与在原始问题中的离散分配\(\mu^⋆_x\)不同(方程6)。另一个微妙的点是,在所有原型上训练时对任何x∈S的软加权分配与推理时对最近原型的硬聚类分配不匹配,这导致了训练和推理之间的不一致。
我们提出了一个新的替代连续松弛方法来解决离散k均值问题,利用AM动力学(3.1),在k均值目标中保持离散分配。给定原型(内存)\(R=\{\rho_{\mu},\mu\in[k]\}\),动力学(方程2)和更新(方程4)确保任何例子(粒子)x∈Rd将收敛到一个原型\(\rho_{\hat{\boldsymbol{\mu}}_x}\)对应的一个盆地,如果我们设置\(x^{0}\leftarrow{x}\)和对T时间步长的x0应用公式4中的更新,那么\({x}^{T}\approx
\rho_{\hat{\mu}_{x}}\)。此外,对于适当的β,\(\hat{\mu}_{x}\)匹配k-means目标中的离散分配\({\mu}_{x}^*\)(公式6)。
这意味着,对于适当设置β和T,\({x}^{T}\approx\rho_{\mu_{x}^*}\),允许我们取代所需的每个例子损失\(\|x-\rho_{\mu_{z}^*}\|^{2}\)目标\(\|x-x^T\|^{2}\),允许我们重写k意味着(方程6)以下连续优化问题:
\[\min_R\sum_{x\in S}\left\|x-x_R^T\right\|^2
\\\mathrm{~where~}x^0\leftarrow x\] 其中,\(x^T_R\)是通过T递归步骤对任何x∈S进行更新得到的,下标“R”突出了对原型R的依赖性。
通过上面的讨论,方程8中的目标对原始k-means目标(方程6)具有期望的离散分配,因为\(x^T_R\)恰好收敛到其中一个原型。与现有的“加权和”方法相比,这是k-均值目标的一个显著不同的放松。这种松弛的紧密性依赖于β(逆温度)和T(递归深度)的选择——我们将它们视为超参数,并以一种依赖于数据的方式来选择它们。对于任何给定的β和T,我们可以通过通过时间的反向传播,用SGD(和变量)最小化方程8。
3.3.理解由AMs引起的分区
3.4.ClAM:聚类 与AMs和自我监督
接下来,我们希望利用上述AMs(3.1)的强大模式完成能力。我们使用标准掩膜自我监督学习——我们应用(随机)掩膜\(m\in\{0,1\}^ d\)到点\(x\in S\subset\mathbb{R}^{\bar{d}}\)和利用上e递归完成部分模式\(x^0 = m\odot x\)和ground-truth之间的失真掩盖值和完成模式我们的损失如下: \[\mathcal{L}=\sum_{x\in S}\mathbb{E}_{m\sim\mathcal{M}}\|\bar{m}\odot(x-x_{R}^{T})\|^{2}, x^{0}\leftarrow m\odot x\] 其中\(x^T_R\)由\(x^0\)演变而来,方程4的T递归。原型R是通过SGD最小化自监督模式完成损失(方程9)来学习的。精确的学习算法在算法1的TrainClAM子程序中给出,并如图5所示。
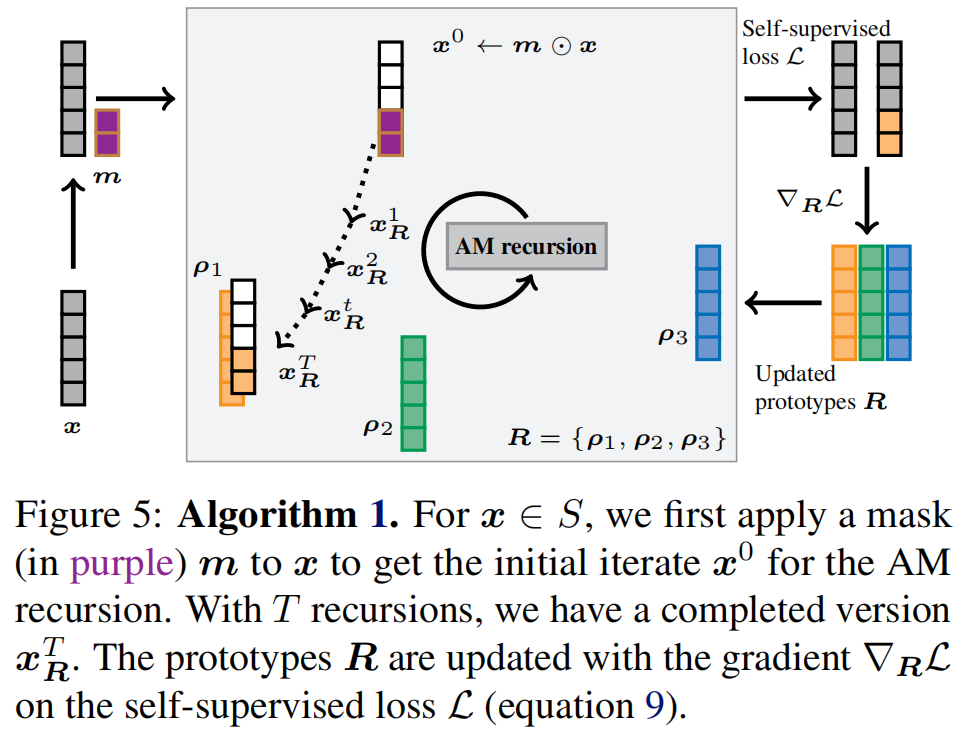
图5:算法1。对于x∈S,我们首先应用一个掩码(紫色的)m到x来得到AM递归的初始迭代x0。对于T递归,我们有一个完整的版本x T R。原型R用自监督损失L上的梯度∇RL进行更新(公式9)。
在随机播种原型(第2行)之后,我们对数据(第3行)(数据批B中的每个x),我们应用随机掩码(第8行),使用当前原型(第9-12行)完成AM递归的模式,累积公式9(第13行),并使用批梯度(第14行)更新原型。
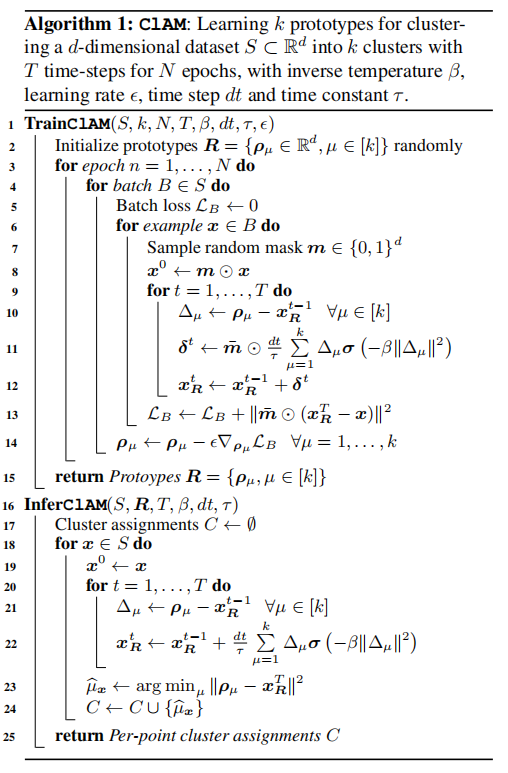
命题3.1:算法1中的TrainClAM子例程占用\(O(dkTN|S|)\)时间,其中\(|S|\)是S的基数,收敛到一个\(O(N^{-1/2})\)-平稳点。
\(N^{-1/2}\)项来自于光滑非凸问题的标准SGD的收敛速度(内斯特罗夫,2003),可以通过动量改进到\(N^{-3/2}\)(Fang等人,2018),考虑到我们的提出的端到端可微性,这是很简单的。算法1的InferClAM子程序使用学习到的原型R分配集群,并一次通过S。这在聚类结束时调用一次。
命题3.2:算法1中的InferClAM子例程需要占用\(O(dkTN|S|)\)时间,其中\(|S|\)是S的基数。
从命题3.1和3.2中,我们可以看到,ClAM训练和推理在数据集S中的点\(|S|\)数、维数d和簇数k上是线性的。对于数据集S上的N个时期,ClAM训练取\(O(dkTN|S|)\),其中T为AM递归深度,而k-means训练(采用Lloyd算法)取\(O(dkN|S|)\)。因此,k-means和ClAM都与点数成线性关系,尽管ClAM运行时有一个乘法系数T,其中T通常小于10。所以k-means直觉上比ClAM快。需要注意的是,k-means和ClAM明显高于谱聚类和凝聚聚类,凝聚聚类的样本数量通常在二次和三次之间。注意,对于相同数量的时代,我们可以为基于SGD的ClAM建立收敛保证(这可以通过使用基于动量的SGD来改进),而k-means没有类似的收敛保证。
(未完)