Learning Discriminative Noise Guidance for Image Forgery Detection and Localization
发表于AAAI2024,一种两阶段判别噪声引导的方法,第一阶段训练一个噪声提取器,以明确地扩大真实区域和伪造区域之间的噪声分布差异,第二阶段将噪声不一致和RGB数据集成,以进行伪造检测和定位。
*现有问题*: - 随着篡改和后处理技术的发展,这两个区域在噪声域之间的差异变得不那么明显,甚至不那么隐藏。鉴于这些缺陷,我们建议明确地学习和利用噪声的不一致性可以进一步提高IFDL的性能。
*解决方案*:
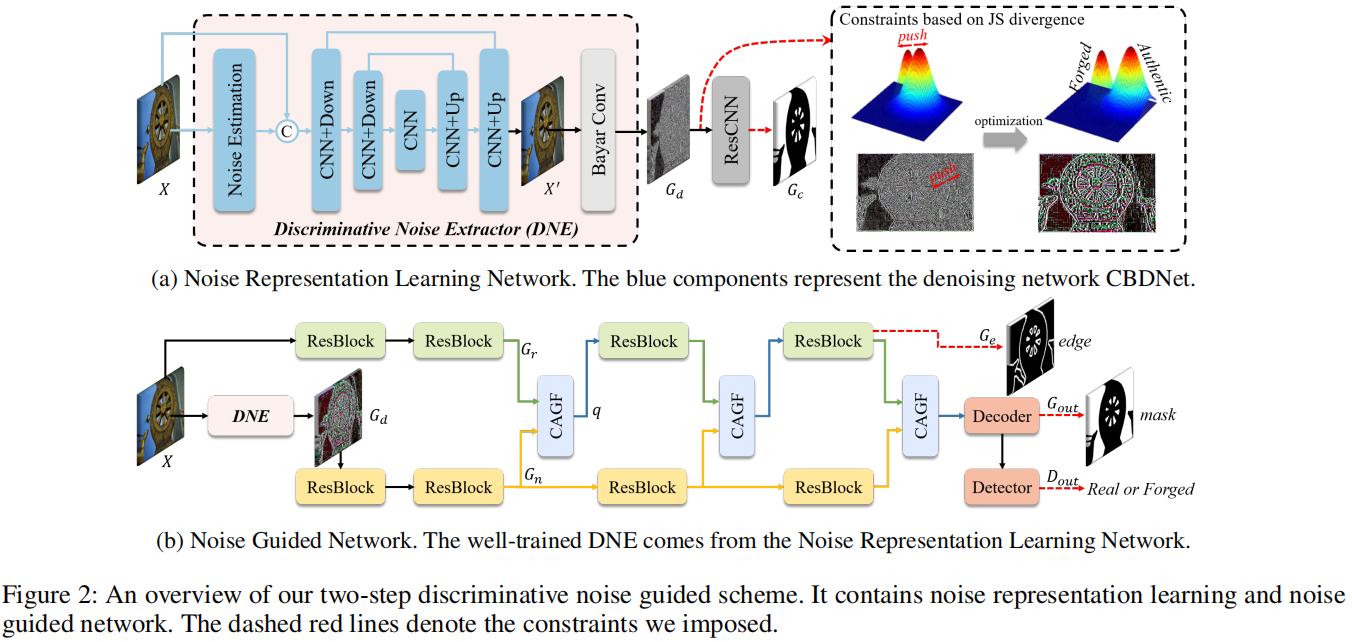
通过关注噪声域内的操纵痕迹来检测和定位图像伪造,一种两阶段判别噪声引导的方法,第一阶段训练一个噪声提取器,以明确地扩大真实区域和伪造区域之间的噪声分布差异,第二阶段将噪声不一致和RGB数据集成,以进行伪造检测和定位。
具体情况
一阶段:
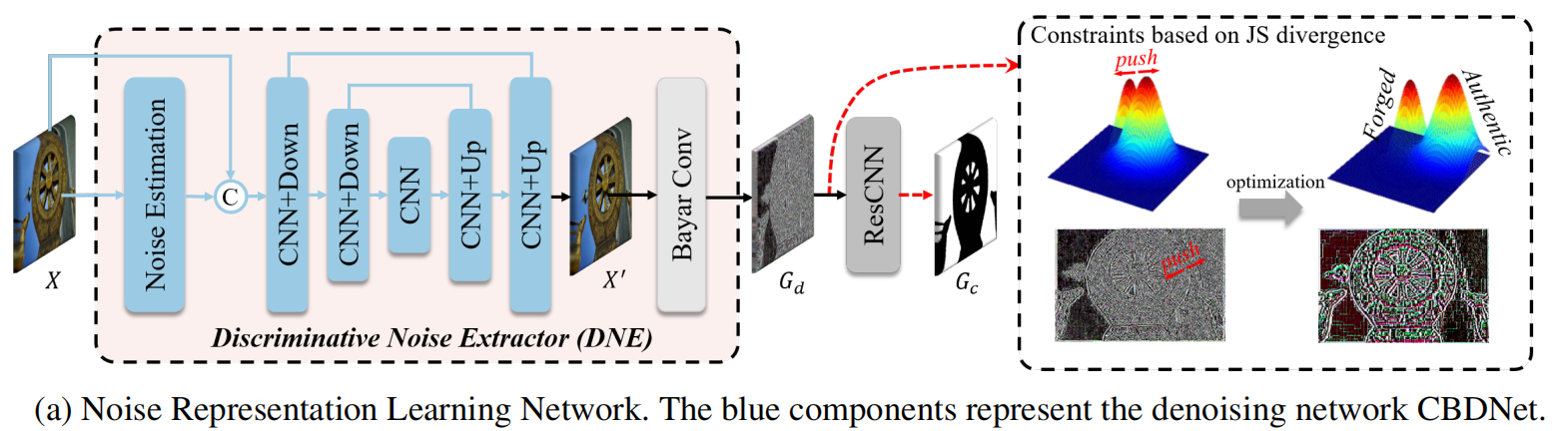 为了明确地分离出这两个区域(真实的和伪造的)的噪声分布,我们引入了JS散度来约束 $ G_d $ 。首先,我们利用 groundtruth掩模,将 $ G_d $ 划分为真实区域 $ N_a $ 的噪声和伪造区域 $ N_f $ 的噪声。
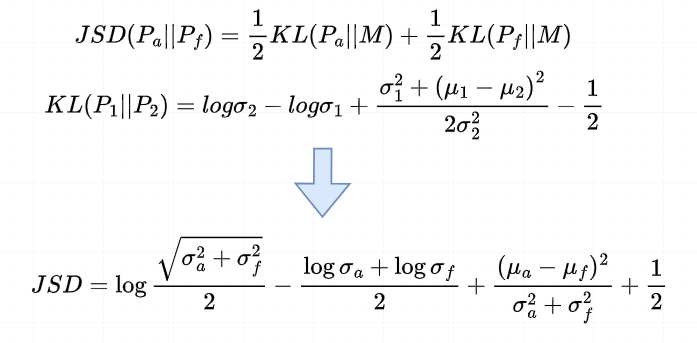
式中, $ \sigma_a $ 、 $ \sigma_f $ 为 $ N_a $ 和 $ N_f $ 的标准差, $ \mu_a $ 、 $ \mu_f $ 为 $ N_a $ 和 $ N_f $ 的平均值。
$$ \mathbf{L_{n}}=\lambda\left(1-JSD\right)+\left(1-\lambda\right)\mathcal{L}\left(Y,G_{c}\right) $$ 二阶段:
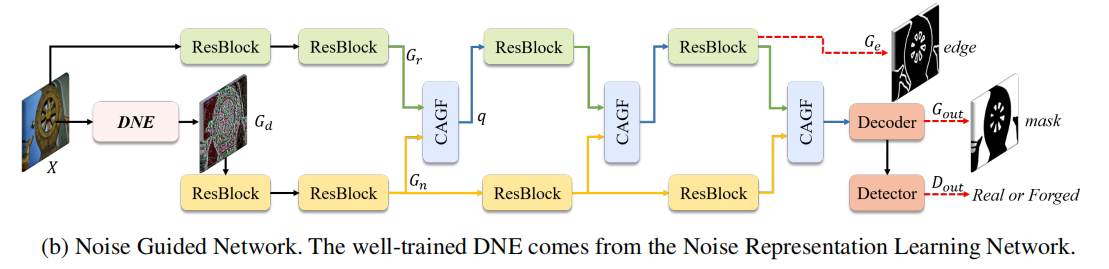
利用两个分支来处理RGB和噪声信息,为了保证噪声不一致对RGB的引导作用,我们设计了CAGF,并将其与ResNet块交替放置。在噪声的引导下,RGB分支可以提取出与篡改伪影高度相关的特征。
1